By loading the video, you agree to YouTube's privacy policy.
Learn more




By loading the video, you agree to YouTube's privacy policy.
Learn more
By loading the video, you agree to YouTube's privacy policy.
Learn more
By loading the video, you agree to YouTube's privacy policy.
Learn more


![]()
INDURAD GMBH
belvedereallee 5
52070 aachen
germany
germany, europe, china,india, middle east, northern africa
![]()
INDURAD PTY LTD
suite 3, level 2
123 adelaide terrace
east perth, wa, 6004
australia
australia, oceania, southeast
asia
![]()
INDURAD CORP.
1200 mcgill college ave. suite
1100
montreal, qc, h3b 4g7
canada
canada, usa
![]()
INDURAD CHILE SPA.
Avenida Apoquindo 5950
Las Condes
Santiago de Chile 7550000
chile, peru, argentina,
colombia, mexico
![]()
INDURAD DO BRASIL
Avenida S Luis, 50 andar 33
Bairro: Republica. São Paulo – SP
CEP 01046926 – Brasil
brazil
![]()
indurad LLC
Almaty, Medeu district
99 Zhamakaeva street, office 218
050040 Kazakhstan
Russia, Baltic, CIS, Mongolia, Ukraine
![]()
INDURAD SOUTH AFRICA
(PTY) LTD
173 oxford road
floor 2 suite 135
rosebank 2196
south africa
germany, europe, china,
india, middle east, northern
africa

Conveyor belt flow & belt misalignment, condition monitoring & wear
Gyratory | Jaw | Crusher Vault
Tertiary
Apron & plate feeder 2D level and material volume
Screendeck performance and material yield measurement
Chute blockage detection and material flow monitoring
3D silo volume measurement + rathole detection monitoring
3D dome volume measurement, material tracking and feeder control
3D stockpile scanning, quality model and automation
Train loadout productivity increase by automation
Waggon unloader automation and material tracking
Stacker Automation, incl. 3D pile monitoring & material tracking
Material quality control and tracking, blending automation
Reclaimer automation and collision avoidance
Level9 collision avoidance for underground vehicles & personnel
IPCC automation and heavy machine positioning solutions
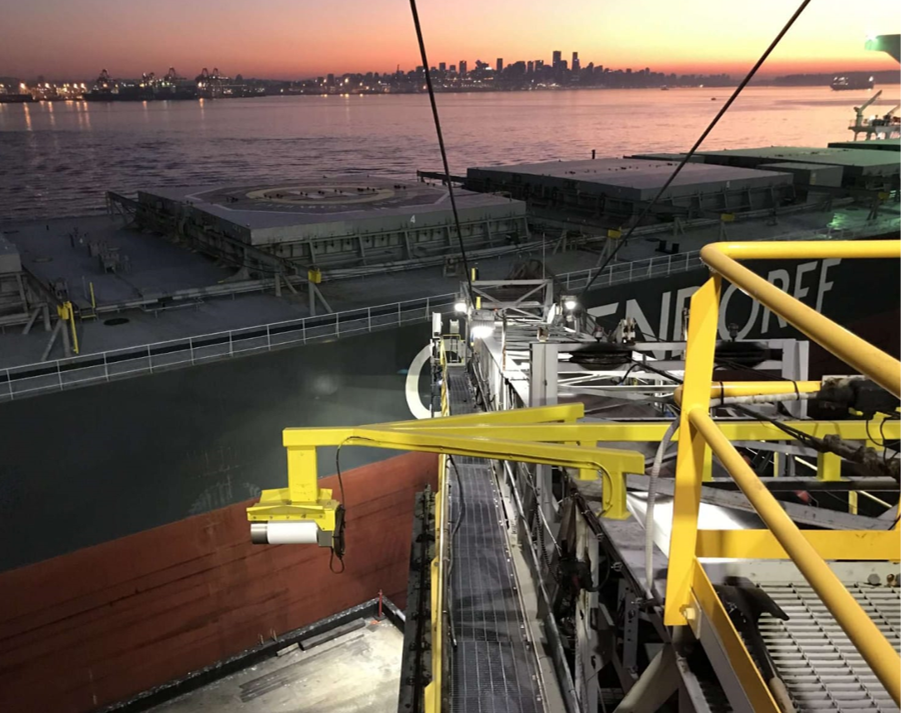
Shiploader collision avoidance, 3D hatch scan and full automation
Horizontal and vertical boom CAS, 3D hatch scan and automation
Vessel detection and ship guidance system for berthing operations
Monthly payments, subscription services
Project based implementation as capital expenditure


Diverse management team driving customer success.

Cross-industry partner network for sales and service - always close to the customer.

company success story and recent developments transforming mining.

Join the Indurad family and develop your career in an exciting environment.

Learn about new developments and the shows and conferences we attend.

The core DNA of indurad. Learn more about the publicly funded RnD.